

Quadrotor Nedir?
Quadrotor adı verilen dört rotorlu insansız hava araçları, en çok tercih edilen insansız hava araçlarından biridir. Dört rotor kullanan quadrotorların kontrol ve kurulumunun kolay olması tercih edilme sebeplerindendir. Quadrotorlar genel olarak sistem kontrolünün kolaylığı açısından avantajlıdır. Quadrotor pervanelerinin sabit hatveli oluşu, basit ve hareketli parçası bulunmayan şasilerin kullanılması ayrıca yüksek itki gücüne bağlı ileri manevra kabiliyeti quadrotorların öne çıkan özelliklerindedir.
Bu tür quadrotorların pek çok avantajlarının olmasının yanında dezavantajları da mevcuttur. Dinamiklerinin doğrusal olmaması nedeniyle yön kontrolü ve kararlılığın sağlanması oldukça zordur. Genel olarak quadrotorların avantaj ve dezavantajları Çizelge 1.1’de görülmektedir.
|
Avantajlar |
Dezavantajlar |
|
Basit mekanik |
Büyük boyutlu ve ağır |
|
Faydalı yük taşıma kapasitesi fazla |
Yüksek enerji tüketimi |
|
Azaltılmış jiroskobik etkiler |
|
Çizelge 1.1 Quadrotorların avantaj ve dezavantajları
Çalışma Prensibi
Quadrotorlarda çarpraz konfigürasyonda yerleştirilmiş dört motor tarafından sürülen dört pervane bulunmaktadır. Ön ve arka motorlar ters saat yönünde dönerken, sağ ve sol motorlar saat yönünde dönerler. Rotorlar aynı hızda döndüğünde jiroskobik etkiler ihmal edilirse hava aracı havalanır. Kararlı bir havalanma sağlanabilmesi için her bir motor tarafından üretilen itki aynı olmalıdır. Motorlardan herhangi birinin itkisindeki en ufak bir değişim hava aracının dengesini ani bir şekilde değiştirerek ters düz olmasına sebep olabilir. Dört motorun hızlarını belirli oranlarda değiştirilerek çeşitli yönlerde hareket elde edilir. Quadrotorlarda genellikle motorlar X, + veya H diziliminde konumlandırılır. Bu dizilimlerin temelde hiçbir farkı olmasa da cihazın kullanım amacına göre farklılık gösterebilmektedir.
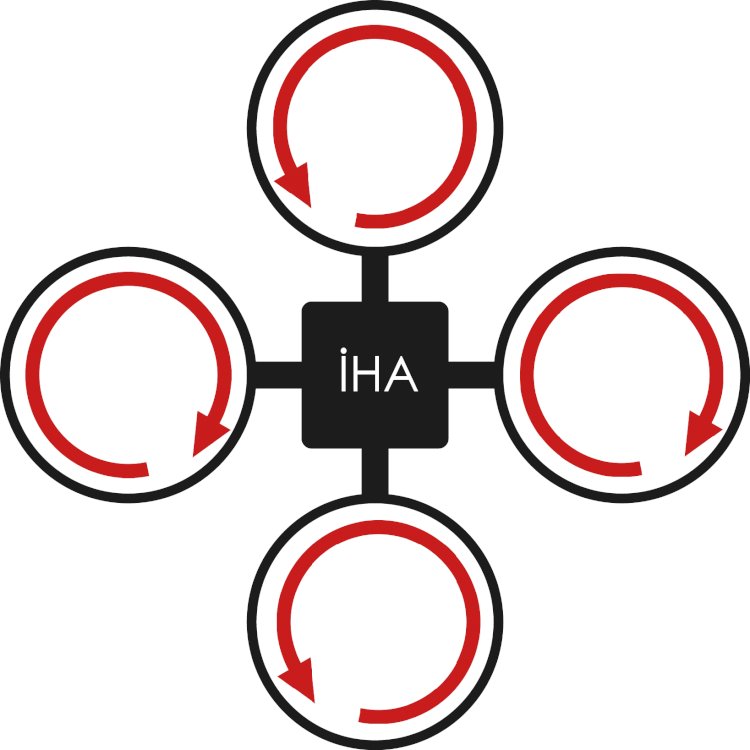
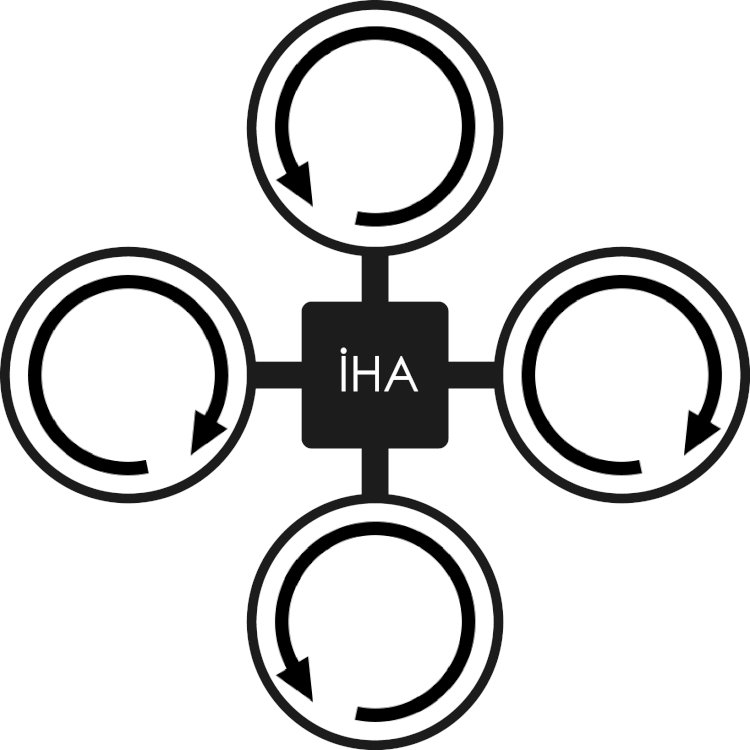
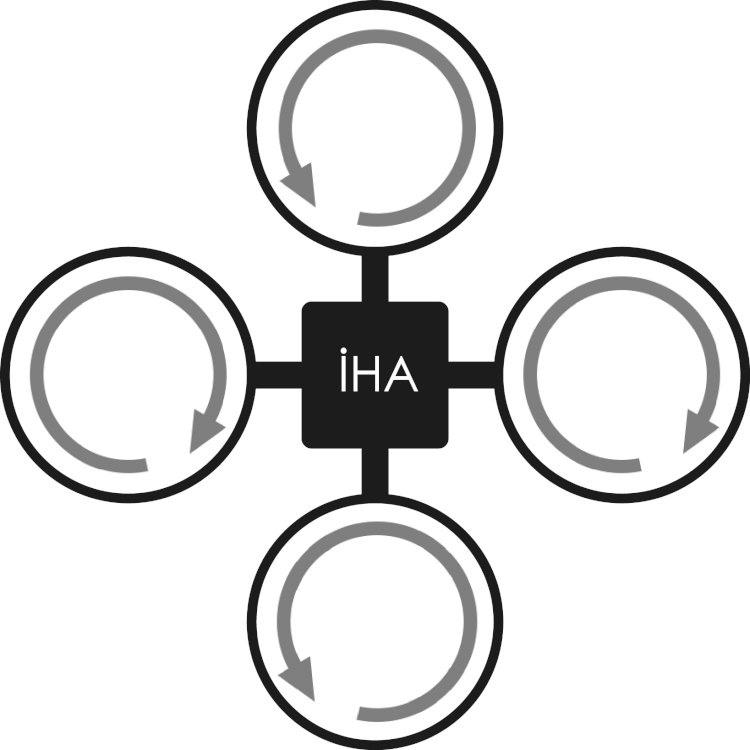
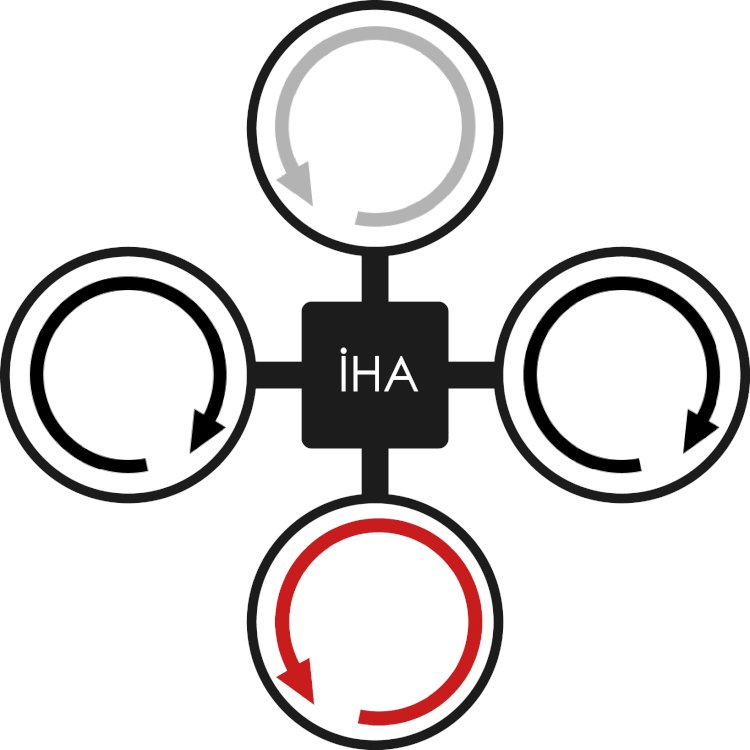
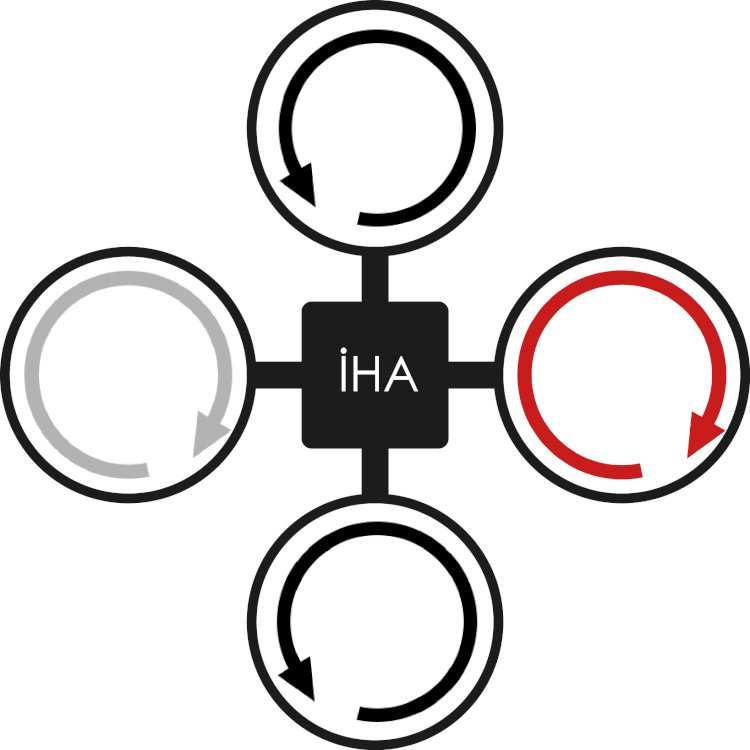
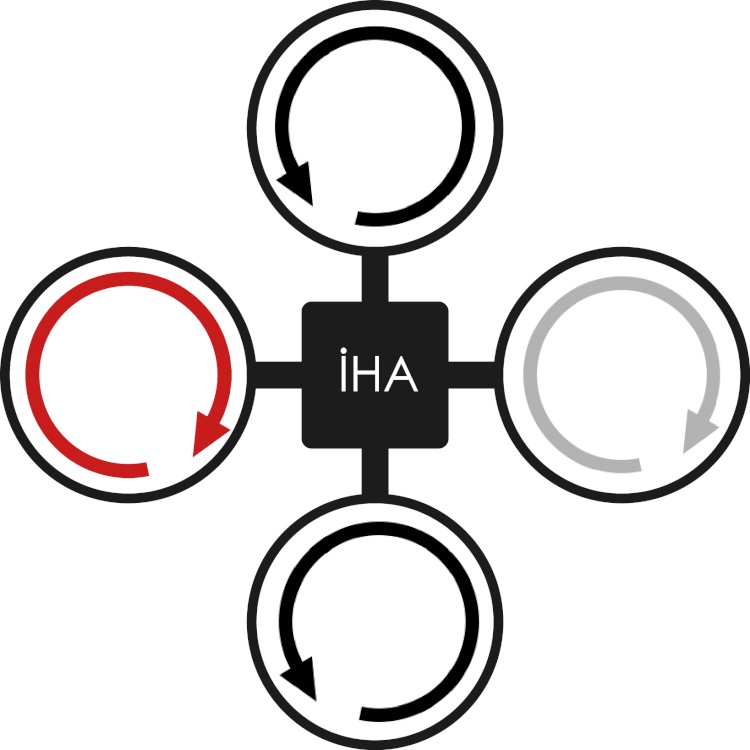
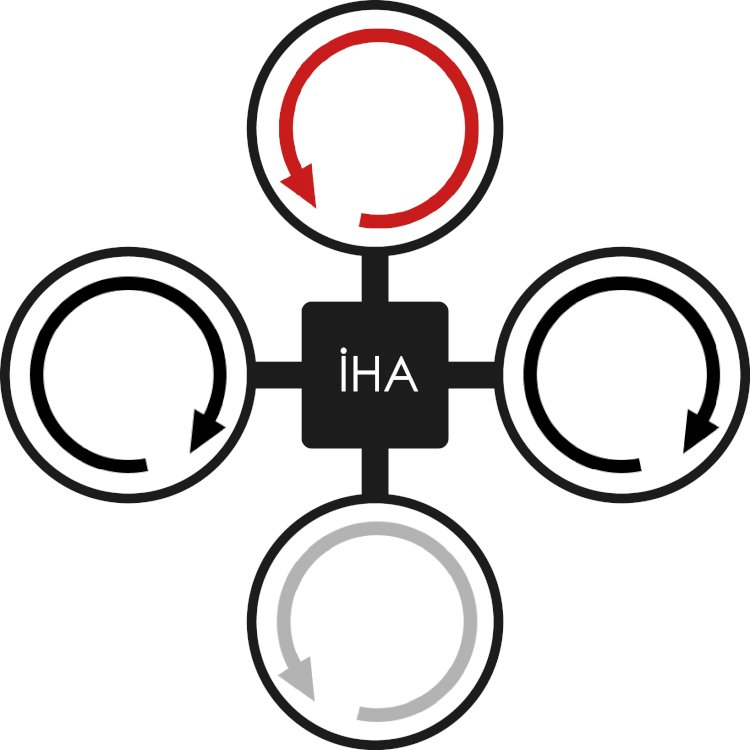
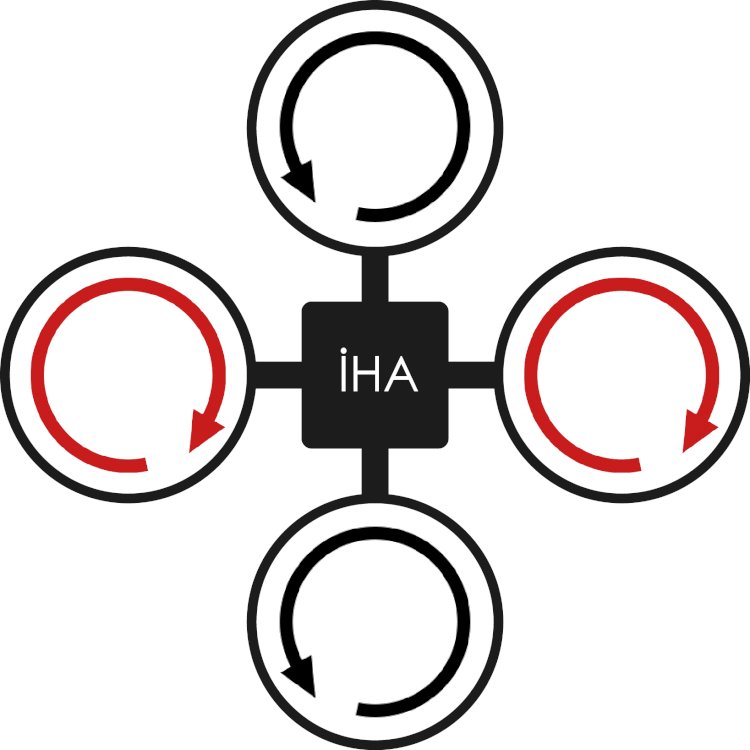
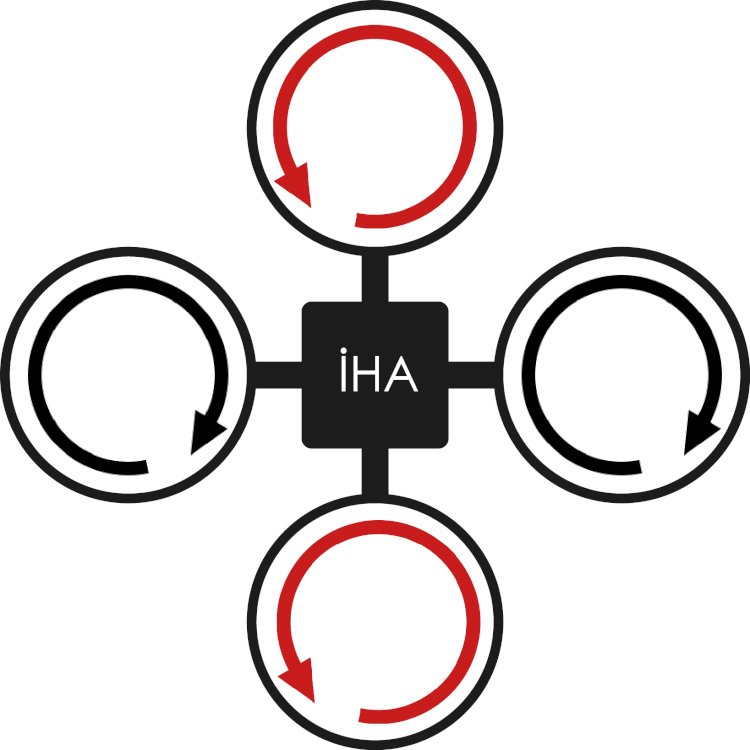
Şekil 1.1’de quadrotorun motor hızlarına ve dönüş yönlerine göre hareket yönleri gösterilmiştir. Ön ve arka motorlar ters saat yönünde, sağ ve sol motorlar ise saat yönünde dönmektedir. Siyah ok anlık hız, kırmızı ok daha hızlı, soluk gri ok ise daha yavaş dönüş hızını temsil etmektedir.
|
(a) |
(b) |
(c) |
|
(d) |
(e) |
(f) |
|
(g) |
(h) |
(i) |
Şekil 1.1 Quadrotorun motor dönüş yönlerine göre çeşitli hareket yönleri
- Havalanma
- Stabil (havada asılı kalma) kalma
- Alçalma
- İleri yönlü (ters saat yönünde yunuslama) hareket
- Sol yönlü (ters saat yönünde yalpalama) hareket
- Sağ yönlü (saat yönünde yalpalama) hareket
- Geri yönlü (saat yönünde yunuslama) hareket
- Olduğu yerde sola dönme (ters saat yönünde sapma) hareketi
- Olduğu yerde sağa dönme (saat yönünde sapma) hareketi
Şekil 1.1 detaylı olarak incelendiğinde, karşılıklı rotorların hızları arttırıldığında açısal sapma hareketi oluşur. Sapmanın yönü ise Şekil 1.1 (h) ve Şekil 1.1 (i)’deki gibi açısal hızı daha az olan rotorun yönünde olduğu görülmektedir.
Karşılıklı rotor çiftlerinden birinin hızı arttırıldığında, yunuslama ve yalpa hareketlerinin oluştuğu görülmektedir. Sağ ve sol motorlardan birinin hızını arttırmak Şekil 1.1 (e) ve Şekil 1.1 (f)’de görüldüğü gibi yalpa hareketine neden olmaktadır. Benzer şekilde ön ve arka motorlardan birinin hızını arttırmak Şekil 1.1 (d) ve Şekil 1.1 (g)’de görüldüğü gibi yunuslama hareketine neden olmaktadır. Bu hareketlerin yönü de yine açısal hızı daha az olan rotorun yönündedir.
Karşılıklı rotor çiftlerinin hızlarının döndükleri yönde arttırılmasıyla havalanma (a), azaltılmasıyla da alçalma (c) hareketi gerçekleşir. Rüzgar gibi negatif etkenlerin olmadığı varsayıldığında karşılıklı rotor çiftlerinin mevcut hızlarını korumaları ise quadrotorun havada hareketsiz olarak asılı kalma (b) hareketini gerçekleştirir.[1]
|
Şekil 1.2 Quadrotorun eksenleri |
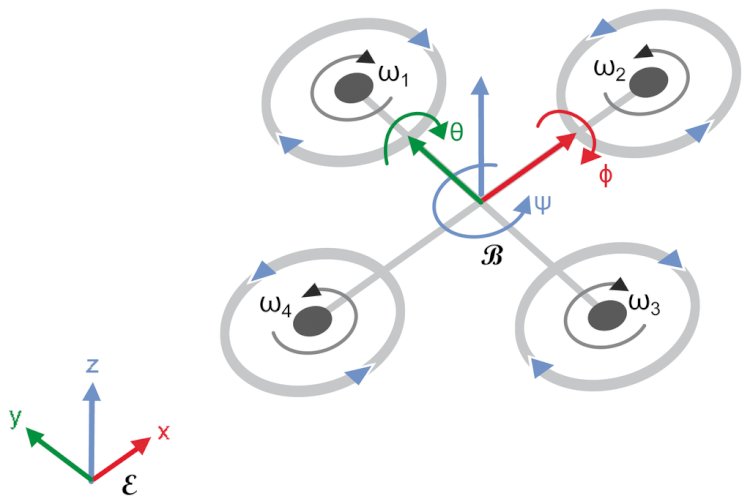
Ψ: Sapma ekseni
θ: Yunuslama ekseni
ø: Yalpa ekseni
ωi: Açısal hız
Rotor Dinamikleri
Her bir pervane tarafından üretilen itki (F), u motor PWM girişi, w motor bant genişliği, K pozitif kazanç, s laplace değişkeni olmak üzere (1.1)’deki gibidir.
 (1.1)
(1.1)
Rotor dinamiği bir durum değişkeni v ile tanımlanmıştır (1.2) ve aşağıdaki gibi ifade edilmiştir.
 (1.2)
(1.2)
Bant genişliğini 25 Hz varsayıldığında dinamik sistem modelinin çeşitli PWM girişleri için basamak tepkisi ve Nyquist kök-yer eğrileri Şekil 1.2 ve Şeki 1.3’teki gibidir.

Şekil 1.2 5 farklı PWM girişi için basamak tepkisi

Şekil 1.3 5 farklı PWM girişi için Nyquist kök-yer eğrileri
PID Kontrol
PID kontrol kullanım kolaylığı nedeniyle endüstride çok kullanılan bir kontrol yöntemidir. u(t) kontrol değişkeni, e(t) toplama noktası, KPID, Ti, Td PID parametreleri olmak üzere Karl Astrom tarafından tanımlana algoritma (2.1) ve (2.2)’de olduğu gibidir.[2]
 (2.1)
(2.1)
 (2.2)
(2.2)
P oransal, I integral, D türevsel kontrol olmak üzere (2.1)’de verilen formül (2.3)’te olduğu gibi daha basite indirgenebilir.
 (2.3)
(2.3)



Oransal kontrol, hata miktarına ve Kp katsayısına bağlı olarak oransal kontrol, denetleyici çıkışını üretir. Sistemin statik doğruluğunu ve dinamik cevabını artırır. Oransal kontrol, hatanın ve oransal kontrol katsayısının doğrudan fonksiyonudur. İntegral kontrolde, Ki kontrol katsayısına ve hata miktarına göre denetleyici çıkışı ayarlanır.
Dinamik cevaptan feragat ederek statik doğruluk miktarını artırır. İntegral kontrol, hata birikiminin ve integral denetleyici katsayısının fonksiyonudur. Türevsel kontrolde ise hatanın değişme hızına ve Kd türevsel kontrol katsayısına bağlı olarak, denetleyici çıkışı ayarlanır. Dinamik cevabı artırır veya geliştirir. Türevsel kontrol, hatanın değişme hızının ve türevsel kontrol katsayısının doğrudan fonksiyonudur.[3]
Quadrotor hava aracının X, Y, Z eksenleri boyunca ve bu eksenler etrafındaki hareketinin PID tekniğiyle kontrolünü basitleştirmek için çeşitli varsayımlar yapılmıştır. Sistem hareketi 4 bağımsız kanala ayrılmıştır:
- Z ekseni boyunca düşey hareket
- Yunuslama hareketiyle birleştirilmiş X ekseni boyunca hareket
- Yalpa hareketiyle birleştirilmiş Y ekseni boyunca yanlamasına hareket
- Sapma hareketi
Sonuç
Bu yazımda, bir dört motorlu + konfigürasyonunda insansız hava aracının tanımlanması, tipik özellikleri ve kavramsal çalışma prensipleri ele alınmıştır. Rotor dinamiklerin için tanımlanan temel transfer fonkisyonu dikkate alınarak sistem tepkileri simüle edilmiştir. Motor kontrol sistemi için PID kontrol ele alınarak sistemde gösterebileceği tepkilerin temel anlamda analizi gözden geçirilmiştir. Günümüzde çoğu sektörde yerini alan insansız hava araçları için en basit ve temel bilgiler derlenmiştir.
Kaynaklar
[1] Canbolat Tosun, D., MSc. (2015), Design of an Adaptive Control System for a four-rotor UAV.
[2] Kuşcu, H., Otomatik Kontrol (PID Kontrol)
[3] Ömürlü, V.E., Otomatik Kontrol I, 2005


